Как управлять шаговым двигателем без контроллера
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
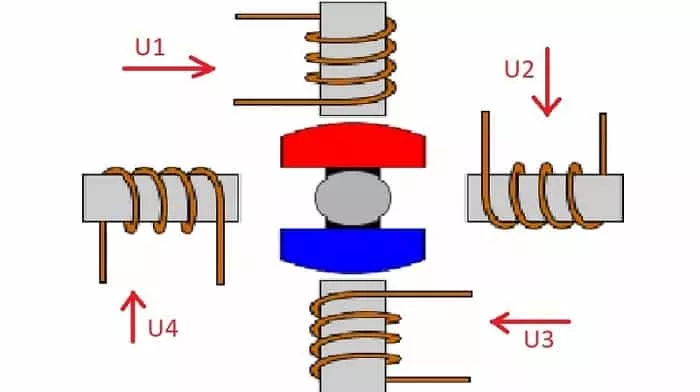
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:

Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.

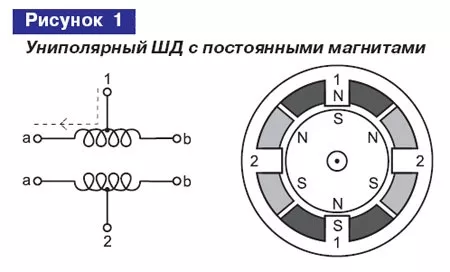
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося
основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Замкнутые и разомкнутые системы
Системы позиционирования оси позволяют интеллектуальным контроллерам позиционировать оборудование с исключительной точностью. Выдается команда на перемещение в желаемую точку в трехмерном пространстве и машина реагирует очень быстро и точно.
Системы позиционирования обычно используют один из двух способов: системы с замкнутым и разомкнутым контуром. Так в чем же разница между этими двумя подходами к позиционированию?
В системах с замкнутым контуром обычно используются серводвигатели для управления скоростью и положением движущейся оси. Серводвигатели работают так же, как и любой обычный двигатель, когда на них подается питание, они вращаются. Это вращение принимает непрерывное плавное движение. Задача серводвигателя — не только приводить двигатель в действие, но и точно контролировать скорость.
Наряду со скоростью в замкнутой системе также требуется обратная связь по положению. Обычно это обеспечивается энкодером или линейной шкалой. Позиционная обратная связь с контроллером машины позволяет ему быстро двигаться к заданному месту, а затем плавно замедляться, чтобы остановиться на цели.
В системах с разомкнутым контуром нет устройства обратной связи для контроля скорости или положения. Вместо этого расстояние, которое необходимо преодолеть от текущего местоположения, делится системой управления машиной на несколько точных шагов определенного размера. Система управления также определяет оптимальную кривую скорости системы на основе предварительно определенных параметров. Затем команды поступают на шаговый двигатель в виде импульсов. Работа драйвера шагового двигателя заключается в преобразовании командных импульсов в фактические шаги привода двигателя далее шаговые двигатели продвигаются по этим шагам, достигая желаемого результата.
Какие драйвера для шаговых двигателей 3D принтера можно купить?
1. TMC2208, TMC2130, TMC2100. Выходной ток на обмотку с дополнительным охлаждением – до 2 А, пиковый выходной ток 2,5А. Напряжения питания силовой части: 4.75 — 36 В. Дробление шага: 1/2, 1/4, ⅛ и 1/16 с возможностью интерполяции до 1/256. Он используется для снижения уровня шума при работе с 8-битными микроконтроллерами. Может применяться в устройствах с маломощными режимами работы, а так же в оборудовании, где востребована высокая энергетическая эффективность моторов. TMC2208 построен на микросхеме от Trinamic и способен выдавать до 2.5 А на обмотку, чего достаточно для использования в 3D принтерах и ЧПУ. При этом решается проблема шумности работы шаговых двигателей за счёт эффективных алгоритмов формирования управляющих импульсов(StealthChop2™) и управления током.
Тихие драйверы, рекомендуем ставить именно их. Стоит дороже остальных около 15 $.

2. A4988 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А, без охлаждения – до 1 А. Напряжения питания силовой части: 8-35 В. Преимущества драйвера А4988 – наличие защиты от перегрузок и перегрева, возможность регулировки тока и несколько вариантов микрошага. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16. На 9В значительно тише, чем на 12В, без потери крутящего момента. Резкое усиление звука происходит с 11В до 12В. Стоимость около 6 $.
Советуем к прочтению: Как определить фазу и ноль: индикаторной отверткой, мультиметром, визуально

4. DRV8825 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А. Напряжения питания силовой части: 8-45 В. Электрическая и механическая совместимость с драйвером A4988. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32. По отзывам имеют конструктивный недостаток, что выражения в появлении дефектов на поверхности отпечатка в виде вертикальных полос(полосы зебры). Недостаток можно устранить установив TL-Smoother, но гораздо рентабельнее будет купить вместо них TMC2208. Стоимость около 6 $.

Сглаживающее устройство TL-Smoother
Плата, которая соединяет шаговый драйвер и шаговый двигатель, уменьшая шум и вибрации на вашем 3D-принтере, снижая риск образования дефекта«полоса зебры».
Эта небольшая плата имеет восемь выпрямительных диодов, которые улучшают форму волны шагового двигателя, в частности, для более старых более дешевых шаговых драйверов, например DRV8825 и A4988. Улучшение формы волны снижает шум двигателя за счет уменьшения вибрации. Поскольку вибрации уменьшаются, качество печати также улучшается. Просто установите плату между драйвером и шаговым двигателем, ориентация не имеет значения. Для удобства в комплект входит небольшой 4-проводной разъем длиной 20 см, чтобы подключить плату к электронике. Стоимость около 7 $

Дефект полосы зебры или муар
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)

Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive

Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive

Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
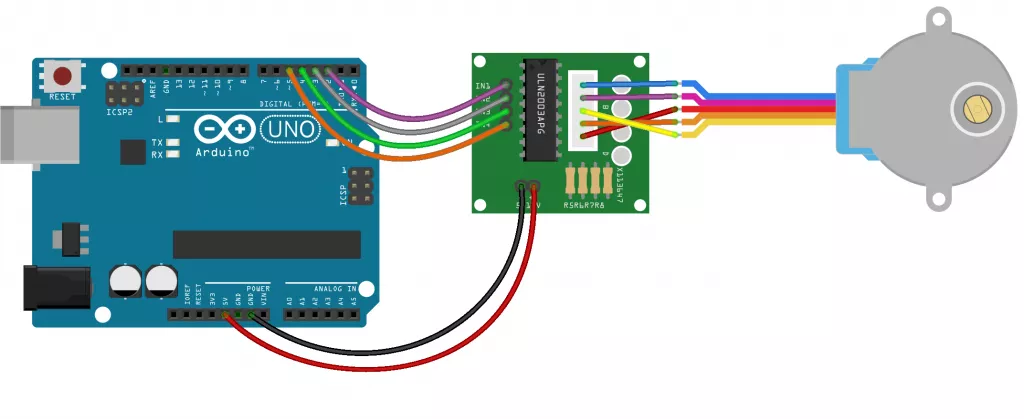
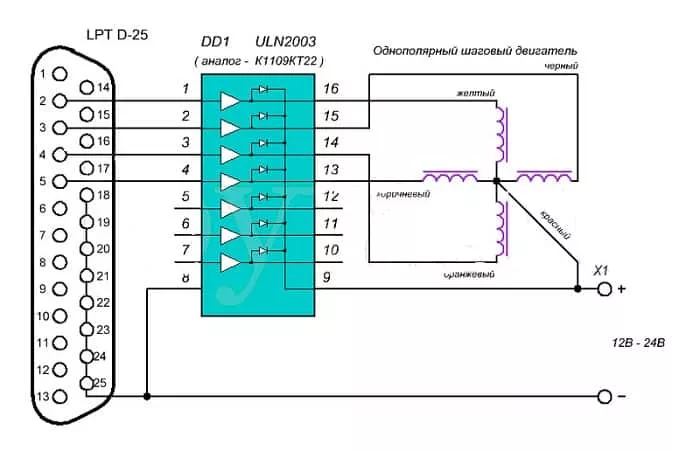
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
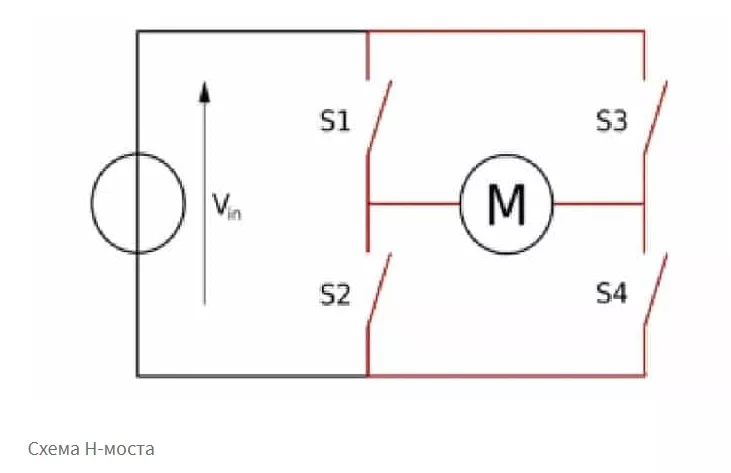
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Контроллер управления шаговыми двигателями, сделанный своими руками
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):
Работа над схемой:

Разводим печатную плату:

Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Советуем к прочтению: Импульсный блок питания: что это такое, принцип работы, схема, назначение
Главное — подобрать экспозицию:

Идет процесс травления печатной платы:

Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:

Паяльник старенький да удаленький:

Забиваем плату деталями:

Все детали запаяны:

Обратная сторона платы, начался процесс отладки:
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:

В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
Контроллеры ШД
Контроллеры – платы коммутации, используемые для преобразования управляющих команд, поступающих с ПК, в последовательность импульсов для драйверов. Плата может иметь дополнительный функционал – разъемы для подключения концевых ограничителей, силовые реле, разъемы для управления шпинделем. Подключается к компьютеру через LPT или USB интерфейс.
Многоканальные драйверы ШД –устройство объединяющее в себе драйвера ШД и плату коммутации. Подключаются к ПК непосредственно управляют ШД. Также в состав контроллера входят такие функциональные возможности как таймер СОЖ, конвертор ШИМ для инвертора, силовые реле, разъемы для подключения датчиков ограничения линейных перемещений. Драйвера могут исполняться на различное количество ШД.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Как подключить шаговый двигатель без контроллера

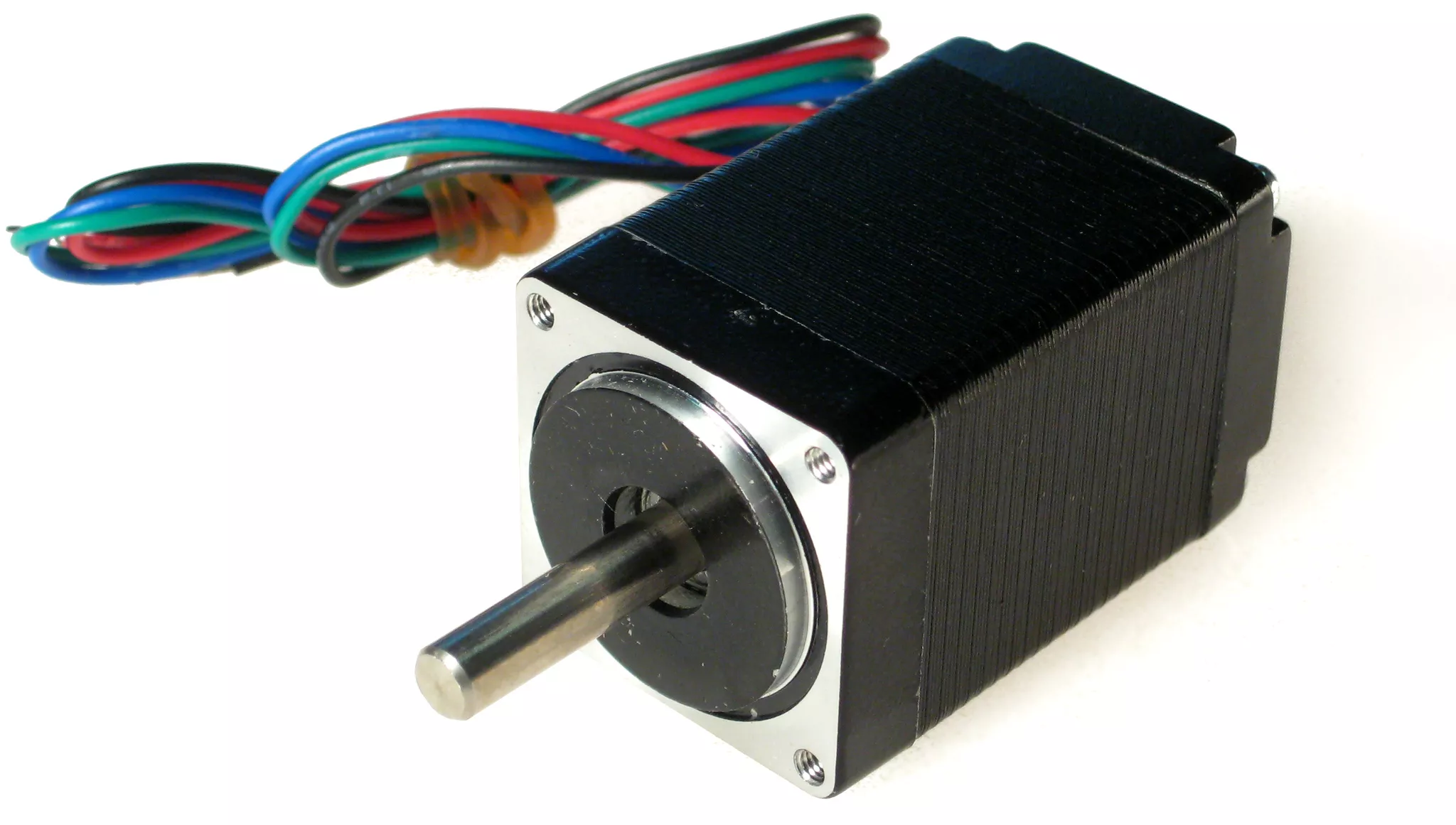
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Схема подключения шаговых двигателей

Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.

В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
От старого сканера:
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: – 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 – провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка – разные шайбы и шурупы – куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.

Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный – к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 – с выводом 3 ULN2003 и вывод 5 – с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания.
Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета. 






Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством – это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку «tcnc». Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC. 




Шаг 6.
Советуем к прочтению: АВР: устройство и принцип действия системы ввода резерва, применение автоматического переключения питания
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную – 175. Нажимайте Tab пока не дойдете до пункта «Last Phase». Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение. 








Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске.
Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы. 








Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо.
Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади. 

Шаг 9.
Изготовление корпуса – это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия.
То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить. 












Шаг 10.
Изготовление корпуса

Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.
Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: – ЧПУ устройство – плоттер – или любую другую вещь, которой нужно точное управление движением. – добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле «number of axis» введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
«XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX»
Для третьей оси в строках первых четырех фаз введите:
«XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001″


- https://stanokcnc.ru/articles/shagovyy-dvigatel-chto-eto-takoe-i-kak-on-rabotaet-printsip-raboty-i-ustroystvo/
- https://3dradar.ru/post/48139/
- https://ElectroInfo.net/jelektricheskie-mashiny/vse-chto-nuzhno-znat-o-shagovyh-jelektrodvigateljah.html
- https://cnc-tehnologi.ru/drajvery-i-kontrollery-shd
- https://avtika.ru/kak-prosto-podklyuchit-shagovyy-dvigatel/
- https://avtika.ru/kak-upravlyat-shagovym-dvigatelem-bez-kontrollera/
Шаговый двигатель: что это такое и как он работает — принцип работы и устройство
- Что такое шаговый двигатель
- Принцип работы шагового электродвигателя
- Какие бывают шаговые двигатели: рассмотрим их разновидности
- Принцип управления шаговым двигателем
- Достоинства и недостатки
- Важные характеристики
- Подключение
- Виды управления
- Полезные ролики по теме
Рассмотрим «сердце» фрезеровочных, шлифовальных, универсальных и многих других станков. Под прицелом внимания – шаговый двигатель: устройство и принцип работы, схема и сферы применения, типы конструкции и варианты программирования. Расскажем все эти и другие важные моменты, чтобы вы понимали, что он из себя представляет и какую его модель выбрать в соответствии со спецификой решаемых задач.
Сразу отметим, что предмет нашего интереса сегодня используется не только в сложном оборудовании, решающем ответственные задачи, но и в сравнительно простых производственных механизмах и даже в бытовых приборах. Он востребован во всех тех случаях, когда необходимо поддерживать достаточно скоростное вращение вала, одновременно сочетая его с точным позиционированием, и поэтому будет оставаться актуальным еще долгие годы.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Гибридные
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Принцип управления шаговым двигателем
Выделяют 3 основных режима, задаваемых драйвером, то есть чипом, посылающим сигналы. Вот они:
- полно-,
- полу-,
- и микрошаговый.
Каждый из них обладает своими особенностями. Первый из них мы уже косвенно описывали выше, и он сводится к поочередной коммутации фаз; причем только одна из них в любой из моментов может быть подключена к источнику – они не должны перекрывать друг друга. Этот закон отражен в английском названии метода – one phase – one step. Точки равновесия при этом обязаны совпадать с направлением полюсов статора.
Минус здесь в том, что одновременно задействована лишь половина обмоток (у биполярного агрегата) или даже четверть (у униполярного).
 |  |
Также можно выбрать принцип работы шагового мотора, при котором питание будет подаваться сразу на все витки. Он известен как способ two-phase-on (full step), и при нем ротор остается в состоянии равновесия между силовыми линиями неподвижной части вала, причем смещенным на половину дискретного движения. Благодаря такому решению крутящий момент может быть повышен до 35-40%.
Полушаговый режим
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
При таком устройстве и работе шагового электродвигателя важно помнить, что его остановка должна производиться с формированием тока удержания – небольшого, намного меньше номинального, но все равно необходимого и важного. Он нужен, чтобы автоматически фиксировать положение ротора после полного отключения напряжения. Иначе подвижный вал будет в свободном состоянии и при механическом воздействии (которое весьма вероятно) сместится, чего нельзя допустить. Зато при его подаче отпадает потребность в организации тормозной системы, добавлении механического фиксатора или другого элемента, способного стать «слабым звеном», то есть снизить общую надежность силового агрегата.
Микрошаговый режим
Рассмотрим, как в этом случае действует пошаговый двигатель: принцип работы сводится ко включению двух фаз с неравномерным распределением тока обмоток. Благодаря этому смещается магнитное поле статора, а вслед за ним и позиция ротора. Диспропорция между переключениями отличается маленькой дискретностью.
За счет такого подхода осуществляются крайне малые шаги – в 1/3 от полного или еще короче, числом до 1000 за оборот. Это позволяет максимизировать точность установки инструментов, хотя и значительно усложняет систему контроля. На практике данное решение востребовано в особо сложных и ответственных случаях, при создании и использовании сравнительно дорогих, но прецизионных станков.
Достоинства и недостатки
Мы уже рассмотрели, как устроен, работает, и где применяется шаговый двигатель, что это такое, но наше описание было бы неполным без анализа плюсов и минусов его стандартных моделей.
В списке объективных преимуществ:
- Поддержка полного крутящего момента при постепенном уменьшении скорости хода, даже перед остановкой.
- Точное позиционирование в рамках выбранного режима, причем без какой-либо обратной связи; количество дискретных перемещений задается углом поворота.
- Положение силового агрегата фиксируется сразу же в момент прекращения движения – ток удержания обеспечивает отсутствие инерционных сдвигов.
- Быстрый старт и реверс, оперативное переключение.
- Регулировать вращение можно прецизионно, возвратного влияния при этом, опять же, не наблюдается.
- Высокий уровень общей надежности, отчасти объясняется тем, что нет коллекторных щеток и других элементов, которые могли бы стать «слабым звеном».
В числе практических недостатков:
- Принцип действия шагового двигателя может сопровождаться чересчур сложным управлением.
- Скорость не очень-то высока номинально.
- Иногда возникает резонанс, что чревато сбоями в установке инструментов.
- Удельная мощность сравнительно мала.
- Под воздействием механических перегрузок возможна потеря позиционирования.
Очевидно, что плюсы значительнее минусов, к тому же, есть области, в которых без рассматриваемых силовых агрегатов просто не обойтись, когда они в разы превосходят коллекторные. Это те случаи точной механики, в которых нужно перемещать узлы с мгновенными остановками и быстрым изменением вектора движения.

Важные характеристики
- С точки зрения электротехники, пошаговый привод – это достаточно сложное устройство, обладающее целым рядом параметров. Вот основные из них:
- Число полных шагов в течение одного цикла – от него зависит точность, плавность хода, разрешающая способность; у современных моделей должно быть на уровне 200-400.
- Угол дискретного перемещения (поворота вала) – рассчитывается как 360 0/количество отдельных передвижений за оборот; аналогичный предыдущему показатель, просто представленный в другом виде; его актуальные значения – 1,8-0,9 градусов.
- Пробивное напряжение – максимальное, по достижении которого нарушается изоляция, определяет безопасность использования.
- Допустимое постоянное напряжение – измеряется в статическом режиме на витках; в ряде случаев не приводится, но и тогда его можно рассчитать по закону Ома.
- Номинальный ток – наибольший из возможных для безопасного и бесперебойного функционирования силового агрегата.
- Сопротивление обмотки – оно, вместе с предыдущей характеристикой, говорит о том, какое количество Вольт можно подавать на пошаговые электродвигатели.
- Индуктивность фазы – определяет скорость нарастания тока; приобретает особенно важную роль при быстром вращении вала.
- Сопротивление изоляции – между обмотками и корпусом.
Отдельным семейством параметров являются моменты:
- крутящий – зависит от частоты вращения; указывается максимальный для данного силового агрегата;
- инерции – чем он меньше, тем быстрее разгон;
- стопорный – нужен для прокручивания вала в случае отсутствия питания;
- удерживающий – активен при полной остановке и запитывании номинальным током двух фаз.
Подключение
- общее число проводов;
- характер запуска.
Есть модели с 4, 5, 6, 8 соединителями; «четверка» подходит только для биполярных, так как у них пара фазных обмоток с двумя коннекторами и нужно устанавливать непрерывные связи. «Шестерка» обладает еще и центр-кранами на каждом витке и поэтому универсально применима ко всем силовым агрегатам.
Типичные варианты коммутации выглядят следующим образом:
 |  |  |
Для беспроблемной эксплуатации важно помнить правила подачи номинального напряжения, а также изменения скорости крутящего момента и понижения линейного.
Виды управления
Помимо уже рассмотренных режимов – полно-, полу- и микро-, – есть и другие, определяющие, как сигналы подаются на полюса и, соответственно, как работает шаговый мотор. Рассмотрим два принципиально разных их типа.
Без контроллера
Реализуется благодаря Н-мосту (часто именно так и называется), позволяющему практически мгновенно переключать полярность и обеспечивать быстрый реверс. Система выстраивается на транзисторах и/или микросхемах: выбранные ЭРЭ гарантируют логическую цепочку, по которой перемещаются ключи. Подходит для бесколлекторных моделей.
Согласно данной схеме, напряжение идет от источника питания к мосту. Контакты включаются попарно (S1-S4 и S3-S2), благодаря чему ток проходит через обмотки, запуская вращение в нужную сторону.
С контроллером
Взглянем на него подробнее, ведь он определяет, как работает и что такое шаговый электродвигатель: это электронный блок, который формирует последовательность сигналов и посылает их на катушки статора. Чтобы он не вышел из строя при возникновении аварийной ситуации (например, при коротком замыкании), выводы привода снабжают диодами, не пропускающими обратные импульсы. Дает возможность реализовать самые разные режимы.
Популярные схемы управления
Предлагаем вашему вниманию два интересных варианта:
Ключевое преимущество здесь – помехозащищенность. Как прямой, так и инверсный сигнал подключаются к своим полюсам напрямую. При ее воплощении в жизнь необходимо озаботиться экранированием сигнального соединителя. Подходит, когда планируете с низкой мощностью использовать шаговый электродвигатель: принципы работы будут выполняться даже при условии высоких нагрузок.
Еще одно достойное решение:
Ключевая особенность – объединение вводов, подключаемых к положительному полюсу. Если при этом будет подаваться питание, превышающее 9 В, понадобится дополнить схему резистором-ограничителем тока. В общем же она очень удобна тем, что обеспечивает возможность строго и точно задавать скорость и количество перемещений в течение оборота.

Если на один его D-вывод подавать логическую 1, а на остальных оставлять 0, транзистор откроется, что обеспечит прохождение сигнала к катушке. Вот таким нехитрым способом осуществляется дискретное передвижение.
Советуем на практике посмотреть, что собой представляет шаговый двигатель, назначение устройства и принцип действия – попробуйте самостоятельно задать ему некоторые команды. Взяв последнюю разработку за основу, не проблема выполнить печатную плату, под заказ или даже своими силами, впаяв в нее необходимые ЭРЭ (почти все диоды, транзисторы, резисторы можно извлечь из отслужившей свое техники). Управление возможно осуществлять с обычного компьютера.
Полезные ролики по теме
Если на эксперименты нет времени или желания, и срочно нужен станок с надежным силовым агрегатом, вам есть из чего выбрать. Достойных производителей сегодня хватает, например, современное оборудование предлагает ижевский завод «Сармат», все модели которого отличаются эргономикой, эффективностью, высокой степенью безопасности.
Ну а напоследок посмотрите, как работает шаговый двигатель, видео помогут вам окончательно понять принцип действия данных приводов.
шаговый двигатель применение в автомобиле

Представим такую ситуацию: ваш двигатель не заводится при температуре около 10 градусов. Что делать? Данная методика может помочь быстро определить неисправность, если имеются приборы для диагностики. Но бывают и другие ситуации. Двигатель может заглохнуть где-нибудь в пути. Или же может глохнуть сразу после запуска. А что можно предпринять, если температура на улице ниже 10 градусов, да еще и автомобиль находится в это время на стоянке? В таких ситуациях данные процедуры не смогут помочь. Так что же делать? Существует несколько советов, которые помогут понять, что за неисправность возникла, и найти способ решение возникшей проблемы.
Существует мнение, что во время запуска двигателя нельзя нажимать педаль дроссельной заслонки. Но это не так. Автомобиль может заглохнуть в ситуации, когда шаговые двигатели отказали или возникла неисправность в их цепях. В этом случае шаговый мотор просто закрывает байпасный канал. И тогда для запуска двигателя необходимо будет открывать дроссельную заслонку. Сначала нужно включить стартер, затем слегка нажать на педаль дроссельной заслонки. Так двигатель можно завести. Но это еще не все. Чтобы двигатель снова не заглох, надо поддерживать его обороты педалью дроссельной заслонки. Так вы сможете добраться до ближайшего сервиса, а там уже вы сможете определить причину, по которой двигатель перестал работать и найти решение проблемы.
Двигатель не заводится.
Что делать, если двигатель в автомобиле не заводится? Очень легко можно определить неисправность, если автомобиль только что заводился. В этом поможет процедура нахождения неисправности. Она проводит проверку узлов системы управления и практически всех электрических связей. Если ваш аккумулятор в порядке, то нужно использовать следующую методику нахождения неисправности двигателя. Она состоит из нескольких этапов.
Проверяется, подается ли на систему электронного управления питание, установлена ли связь с блоком управления. Это можно проверить, подключив тестер. Проверяют также датчик температуры. Нужно, чтобы он правильно отражал тепловое состояние двигателя.
Проверка работы бензонасоса
Повернув ключ зажигания, вы включите главное реле ЭСУД и реле бензонасоса. Если насос работает, то вы услышите это. Если же вы ничего не слышите, это еще не признак неисправности. Насос может просто тихо работать или же его неслышно из-за посторонних шумов. В этом случае нужно открыть заднее сиденье. Там расположен люк бензобака, и очень хорошо слышно, работает ли мотор или нет.
Проверка наличия синхронизации при попытке вращения стартером двигателя.
Во время прокрутки стартером система управления, которая применяется в двигателе, показывает, вращается ли двигатель или нет. Это видно по импульсам с датчика коленчатого вала. Как раз в течение этого процесса прокрутки происходит первая подача топлива. Если ремни газораспределения установлены неправильно, может возникнуть неисправность, связанная с неправильной синхронизацией. И двигатель не будет запускаться.
Проверка системы зажигания
Свечи зажигания могут стать причиной серьезных проблем для владельцев машин, оснащенных ЭСУД. Как известно, в холодное время года приходится несладко. Возникают проблемы с запуском автомобиля. Если он находится в холоде, да еще свечи подводят, тогда приходится довольно тяжело автолюбителям. В принципе, если с двигателем все в порядке, в машине хорошие свечи. То проблем с запуском даже холодного автомобиля не возникает. Но иногда можно встретить дешевые свечи, по 10 долларов за комплект. Сначала такая цена приводит в восторг. Но зато потом проблем не оберешься. Несколько дней, и уже начинаются проблемы. Например, двигатель может троить. Даже в теплую погоду машина не запускается, что уж говорить о холоде? Все дело в том, что при производстве свечей, необходимо соблюдать специальную технологию. У дешевых свечей после недолгого использования возникают микротрещины, и они выходят из строя.
Проверка работы форсунок.
К большому счастью для автолюбителей, некачественных форсунок нет. Те, которые производят, подтверждены качеством таких известных фирм, как Bosch, Siemens, GM. После долгого использования, правда, меняются исходные характеристики. Форсунка может также засориться от «грязного топлива». Чтобы узнать баланс форсунок, нужно воспользоваться тестером ДСТ-6Т. Если вы решили очистить форсунку через топливный бак, будьте осторожны. Последствия могут быть не самые оптимистичные. Такие очистки надо делать постоянно для достижения положительного результата. В противном случае ничего хорошего из этой процедуры не выйдет. Самый надежный способ очистки – это все-таки очистка с помощью специального оборудования. Конечно, это стоит денег. Но в итоге вы поймете, что это самый выгодный вариант.
Плохой пуск двигателя.
Если возникает неисправность в шаговом двигателе, то двигателю не хватает воздуха. В этом случае вы можете ехать на автомобиле, только если будете поддерживать холостой ход педалью дроссельной заслонки. Воспользовавшись тестером ДСТ-2М или ДСТ-8, вы можете выставить обороты холостого хода на прогретом двигателе на уровне 900-1000 оборотов. Затем снять разъем с шагового мотора. Но так можно делать при температуре до минус пяти. При минус пятнадцати прогревайте двигатель с помощью педали дроссельной заслонки. Ниже восемнадцати градусов прогреть двигатель практически невозможно. После пары попыток он заглохнет, а свечи зальет.
Что такое шаговый двигатель? Где он находится в автомобиле и для чего он нужен?
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8 — 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10-20 раз.
Как работает шаговый электродвигатель?
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
К недостаткам применения шагового двигателя относятся:
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.

С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.

С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:

Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.

Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.

Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.

Схема а) с различными, б) с одним выводом
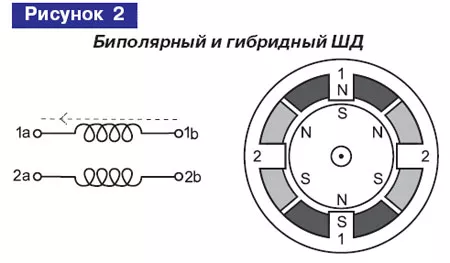
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.

Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
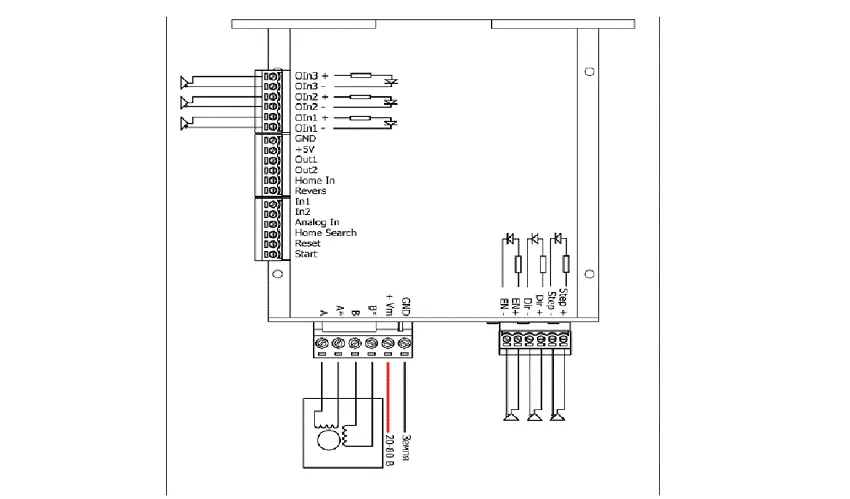
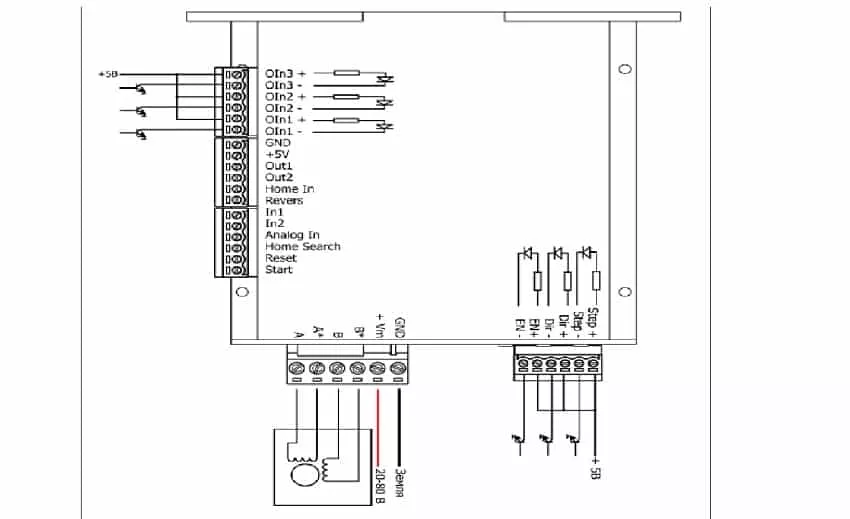
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
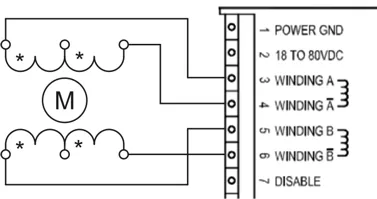
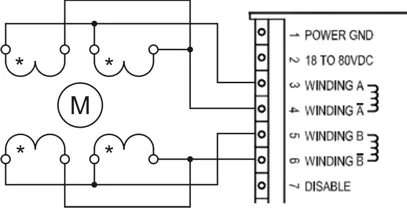
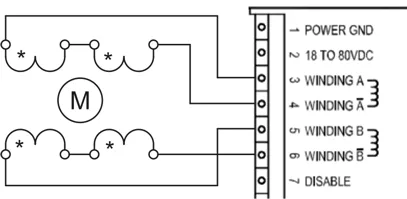
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:

Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.

Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.

Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.

Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.

Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).

Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Источник https://radio-blog.ru/master/theory/kak-upravlyat-shagovym-dvigatelem-bez-kontrollera/
Источник https://stanokcnc.ru/articles/shagovyy-dvigatel-chto-eto-takoe-i-kak-on-rabotaet-printsip-raboty-i-ustroystvo/
Источник https://wheelnews.ru/shagovyy-dvigatel-primenenie-v-avtomobile/